导图社区 简单机械知识导图
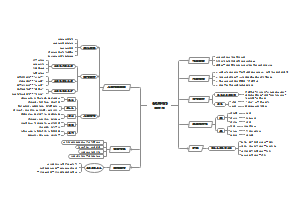
这是一篇关于简单机械的思维导图,内容涵盖了轮轴、滑轮、斜面、杠杆、机械效率等,希望梳理的内容对你有所帮助!
这里是一篇关于电与磁的思维导图,大致概述了电与磁的知识点,对物理学习感兴趣的朋友们可以参考此图。
这是一篇关于新中国外交发展历程的思维导图,对于历史的期末复习,很有帮助,需要的朋友,可以收藏下哟。
社区模板帮助中心,点此进入>>
《老人与海》思维导图
《钢铁是怎样炼成的》章节概要图
《傅雷家书》思维导图
《西游记》思维导图
《水浒传》思维导图
《茶馆》思维导图
《朝花夕拾》篇目思维导图
《红星照耀中国》书籍介绍思维导图
初中物理质量与密度课程导图
桃花源记思维导图
简单机械
杠杆
定义:一根硬棒,在力的作用下能绕固定点O转动
要素:支点O,动力臂l1,阻力臂l2,动力F1,阻力F2
平衡状态:静止或做缓慢地匀速运动
平衡条件:F1l1=F2l2
力的方向:取决于两个力的作用点 ①动力、阻力作用在支点的同侧,两力方向相反 ②动力、阻力作用在支点的异侧,两力方向相同
画力臂:①找支点和力的作用线 ②延长力的作用线 ③以支点为起点,作力的作用线的垂线(虚线) ④标出力臂
最小动力臂:①连接支点与作用点 ②作力臂的垂线,标出最小作用力
分类:①等臂杠杆(F1=F2 l1=l2) ②省力杠杆(F1<F2 l1>l2)※省力费距——钳子、羊角锤、踮脚 ③费力杠杆(F1>F2 l1<l2)※省距费力——桨、筷子、镊子
实验:探究杠杆的平衡条件
要求:杠杆两端水平、静止
原因: 实验前:避免杠杆重力的影响 实验中:便于测量力臂
结论:F1l1=F2l2
注意:多次试验,寻找普遍规律
机械效率
机械效率总是小于1 (除非不计摩擦)
η=W有/W总=Gh/FS=gG/Fn=G物/G物+G轮
斜面
省力费距
影响因素:粗糙程度、倾斜程度、物重
W有=Gh W总=FS W额=Gh-FS
滑轮
定滑轮
特点:轴固定不动
不省力、不省距离、只能改变力的方向
动滑轮
轴随物体运动
省一半的力、不省功(重力与摩擦力不计)、费一倍距离、不改变力的方向
滑轮组
拉绳子的距离=物体上升距离×动滑轮绳子段数 (s=nh)
提起物体的力=物重÷动滑轮绳子段数 (F=G/n)
既能省力,又能改变力的方向,但费距离
判断绳子的缠绕方式:动滑轮绳子段数 ①当n为偶数,绳子的起端在定滑轮上 ②当n为奇数,绳子的起端在动滑轮上
轮轴
定义:由共同转动轴的大轮和小轮组成
转大轮省力费距——自行车、门把手、方向盘、水车 转小轮省距费力——摩天轮
实质:连续旋转的杠杆 (两个力在同一端)