导图社区 (医学微生物学)Chapter 11 肠杆菌科
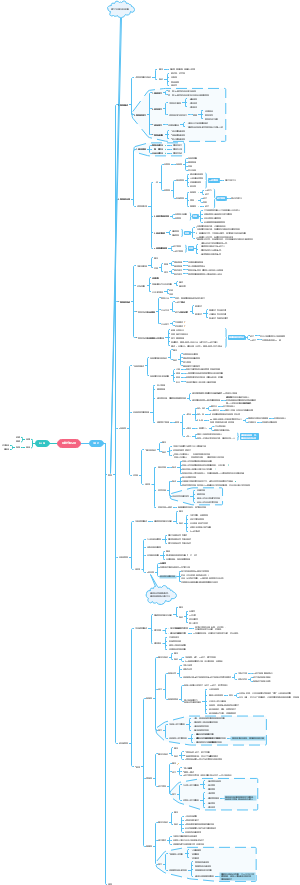
(医学微生物学)Chapter 11 肠杆菌科
医学微生物学 第11章 肠杆菌科 考点总结。医学微生物学知识点繁多,记忆易混淆,此思维导图汇总归纳了微生物肠杆菌科的重点和考点,有助于期末考试复习和背诵。可收藏,亦可使用后补充知识点,完善属于自己的知识框架。
编辑于2022-05-02 12:02:43- 肠杆菌科
- 大肠埃希菌
- 痢疾志贺菌
- 伤寒沙门菌
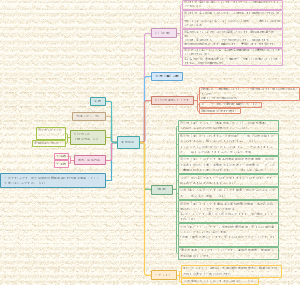
- 病理学 第11章 泌尿系统疾病(考前绝杀版)
病理学 第11章 泌尿系统疾病 考前绝杀版知识点总结。 此思维导图汇总归纳了泌尿系统疾病的考试重点和考点,知识点的不同颜色代表不同重要程度,黑色字体为考点,红色和紫色字体为易混淆和易错点,灰色字体为拓展和补充,可做了解并构建完整知识框架,有助于考试前的复习和背诵,为期末考试绝杀版。可收藏,亦可使用后补充知识点,完善属于自己的知识框架。
- 病理学 第11章 泌尿系统疾病
病理学 第11章 泌尿系统疾病 知识点总结。病理学为医学本科较为重要的专业课,学好这门课能为后面的诊断学和内科学学习打下坚实基础。掌握疾病的病理亦是临床工作诊断和用药过程中不可或缺的一环,执业医师考试中对这门课也涉及颇多,可想而知学好病理很重要。 此思维导图汇总归纳了泌尿系统疾病的考试重点和考点,在相关重点后方亦有关于知识点的机制解释,便于理解课本,有助于期末考试复习和背诵。可收藏,亦可使用后补充知识点,完善属于自己的知识框架。
- 病理学 第1章 细胞和组织的适应与损伤
病理学 第1章 细胞和组织的适应与损伤 知识点总结。病理学是医学本科中较为重要的专业基础课,执业医师考试中也会涉及,学好这门课能为后续诊断学和内科学的学习打下扎实基础,故学好病理非常非常重要。 此思维导图汇总归纳了病理细胞和组织的适应与损伤的重点和考点,采取关键词和大纲模式,尽可能浓缩重点,节省有限的复习时间,有助于期末考试复习和背诵。可收藏,亦可使用后补充知识点,完善属于自己的知识框架。
(医学微生物学)Chapter 11 肠杆菌科
社区模板帮助中心,点此进入>>
- 病理学 第11章 泌尿系统疾病(考前绝杀版)
病理学 第11章 泌尿系统疾病 考前绝杀版知识点总结。 此思维导图汇总归纳了泌尿系统疾病的考试重点和考点,知识点的不同颜色代表不同重要程度,黑色字体为考点,红色和紫色字体为易混淆和易错点,灰色字体为拓展和补充,可做了解并构建完整知识框架,有助于考试前的复习和背诵,为期末考试绝杀版。可收藏,亦可使用后补充知识点,完善属于自己的知识框架。
- 病理学 第11章 泌尿系统疾病
病理学 第11章 泌尿系统疾病 知识点总结。病理学为医学本科较为重要的专业课,学好这门课能为后面的诊断学和内科学学习打下坚实基础。掌握疾病的病理亦是临床工作诊断和用药过程中不可或缺的一环,执业医师考试中对这门课也涉及颇多,可想而知学好病理很重要。 此思维导图汇总归纳了泌尿系统疾病的考试重点和考点,在相关重点后方亦有关于知识点的机制解释,便于理解课本,有助于期末考试复习和背诵。可收藏,亦可使用后补充知识点,完善属于自己的知识框架。
- 病理学 第1章 细胞和组织的适应与损伤
病理学 第1章 细胞和组织的适应与损伤 知识点总结。病理学是医学本科中较为重要的专业基础课,执业医师考试中也会涉及,学好这门课能为后续诊断学和内科学的学习打下扎实基础,故学好病理非常非常重要。 此思维导图汇总归纳了病理细胞和组织的适应与损伤的重点和考点,采取关键词和大纲模式,尽可能浓缩重点,节省有限的复习时间,有助于期末考试复习和背诵。可收藏,亦可使用后补充知识点,完善属于自己的知识框架。
- 相似推荐
- 大纲