导图社区 地理第二单元导图
地理第二单元导图
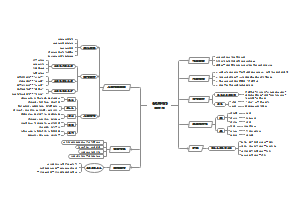
人教版地理八上第二单元思维导图分享.我国幅员辽阔,地形类型多样,有四大高原、四大盆地和三大平原,我国山区多,平原少,因而耕地资源不足,但是山区在发展林业、牧业、采矿业等方面,往往具有优势。
编辑于2022-02-08 23:03:19- 相似推荐
- 大纲
导图社区 地理第二单元导图
人教版地理八上第二单元思维导图分享.我国幅员辽阔,地形类型多样,有四大高原、四大盆地和三大平原,我国山区多,平原少,因而耕地资源不足,但是山区在发展林业、牧业、采矿业等方面,往往具有优势。
编辑于2022-02-08 23:03:19