导图社区 消防基础知识
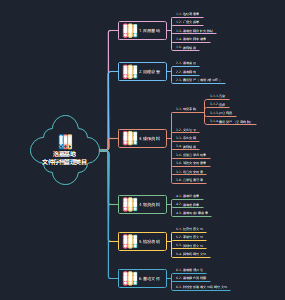
从燃烧、火灾、爆炸及易燃易爆危险品等方面介绍了消防的基础知识
社区模板帮助中心,点此进入>>
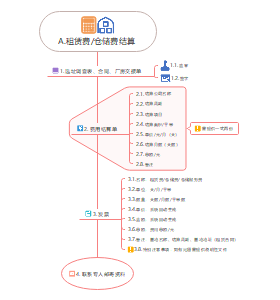
费用结算流程
租赁费仓储费结算
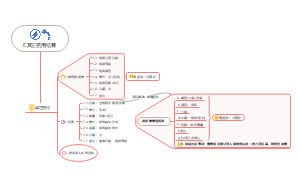
E其它费用
F1开票注意事项
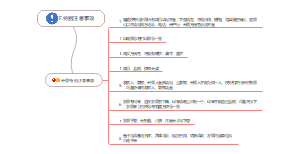
F2结算费用特别注意事项
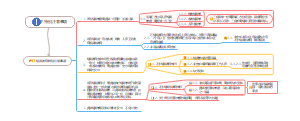
洛嘉基地文件存档管理类目
一级注册建筑师建筑经济
混凝土
实务第一篇第一章燃烧知识树
燃烧类型
消防基础
燃烧
条件
可燃物
助燃物
引火源
直接
明火
电弧、电火花
雷击
间接
高温
自燃
三角形
链式反应自由基
四面体
类型及特点
绝大多数的可燃物质的燃烧都是在蒸汽或气体的状态下进行的,并出现火焰
形成条件发生特点
着火
爆炸
燃烧物形态
气燃
扩散燃烧
预混燃烧
可能回火
液燃
闪燃
沸溢
喷溅
固燃
蒸发燃烧
表面燃烧
异相燃烧
熏烟燃烧
阴燃
无焰燃烧
分解燃烧
动力
化学爆炸
重要概念
闪点
燃点
自燃点
越低越危险
产物
完全燃烧
不完全燃烧
火灾
分类
燃烧对象性质
A固体火灾
B液体或可熔固体
C气体
D金属
E带电
F烹饪物
损失程度
从重不从轻,就高不就低
特别重大
n1≥30、n2≥100、N3≥1亿
重大
30>n1≥10、100>n2≥50、1亿>n3≥5000万
较大
10>n1≥3、50>n2≥10、5000万>n3≥1000万
一般
3>n1、10>n2、1000万>n3
n1为死亡人数、n2为重伤人数、n3为直接财产损失
直接财产损失=重伤人数*100万
建筑火灾
蔓延
热传播
热传导
接触
热对流
介质流动
热辐射
电磁波
烟气流动
线路
第一条
着火房间-走廊-楼梯间-上部各楼层-室外
最主要
第二条
着火房间-室外
第三条
着火房间-相邻上层房间-室外
特点
着火房间
烟气羽流
顶棚射流
烟气层沉降
走廊
竖井
驱动力
烟囱效应
火风压
外界风作用
浮力、气体热膨胀
供暖、通风、空调系统
速度
水平
0.1-0.3m/s
初期
0.5-0.8m/s
中期
垂直
1-5m/s
通常
6-8m/s
烟囱效应影响
发展
初期增长
出现明火
燃料控制型火灾
充分发展
室内火灾最危险阶段
轰燃
通风控制型火灾
衰减
特殊现象
回燃
防火
控制可燃物
隔绝助燃物
控制引火源
灭火
冷却灭火
破坏引火源(温度)
水
隔离灭火
破坏可燃物
泡沫
窒息灭火
破坏助燃物
CO2、N2
化学抑制灭火
破坏链式反应自由基
干粉、七氟丙烷
物理爆炸
爆炸前后化学成分不变
炸药
可燃气体
可燃粉尘
本身可燃
悬浮空气中
浓度合适
火源
压力上升下降缓慢、较高压力持续时间长、释放能量大
可二次爆炸
破坏更严重
所需点火能大、引爆时间长、过程复杂
核爆炸
核裂变
聚变
极限
浓度范围
范围越大越危险
下线越低越危险
体积分数
气体
液体
单位体积中的质量
粉尘
影响因素
火源能量
正
初始压力
反
特例
干燥一氧化碳+空气
初温
惰性气体
一般上线降低
危险源
机械火源
撞击
摩擦
热火源
高温热表面
日光照射并聚集
电火源
电火花
静电火花
雷电
化学火源
化学反应热
发热自燃
易燃易爆危险品
易燃气体
分级
一级
爆炸下限<10%
爆炸极限范围≥12%
或
二级
10%≤爆炸下限≤13%
爆炸极限范围<12%
且
甲类
乙类
爆炸下限≥10%
火灾危险性
易燃易爆性
主要危险性
气比固液易燃,且燃速快
组成成分简单的易燃,燃速快,更危险
价键不饱和的火灾危险性大
扩散性
比空气轻
无限制地扩散
迅速蔓延和扩展
比空气重
长时间聚集不散
局部形成爆炸性混合气体
有较大的发热量
可缩性和膨胀性
PV=nRT
P不变,TV成正比
T不变,PV成反比
V不变,PT成正比
带电性
杂质
流速
腐蚀性
毒害性
易燃气雾剂
易燃液体
初沸点≤35℃
初沸点>35℃
闪点<23℃
三级
23℃≤闪点<60℃
闪点<28℃
28℃≤闪点<60℃
丙类
闪点≥60℃
易燃性
爆炸性
受热膨胀性
流动性
易燃固体
300℃燃点
<
易燃
≥
可燃
燃点低、易点燃
遇酸、氧化剂易燃易爆
本身或燃烧产物有毒
易于自燃物质
发火物质
白磷
三氯化钛
自热物质
赛璐珞碎屑
油纸
潮湿的棉花
遇空气自燃性
遇湿易燃性
积热自燃性
遇水放出易燃气体物质
氧化性物质
有机过氧化物