导图社区 中药学专业知识总结
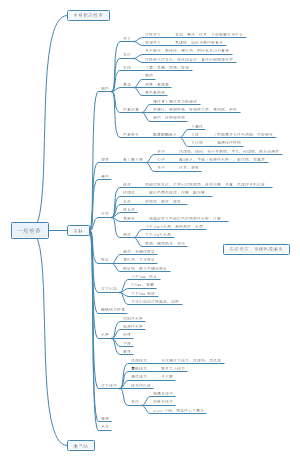
执业药师,中药学专业必看!本图总结了中药学专业知识二第13章化痰止咳平喘药的知识点,分为化痰药和止咳平喘药两个章节,整体脉络清晰且解说详细,值得收藏哦!
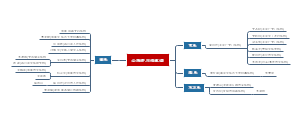
中医治疗“疫病”的历史源流思维导图,整理了先秦两汉时期、魏晋至隋唐五代时期、宋金元时期、明清时期的内容,有兴趣的可以看看哟。
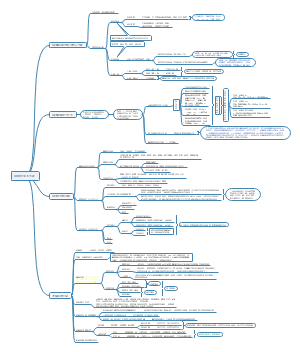
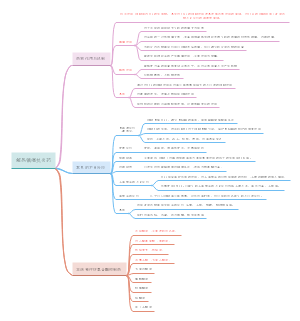
中药学综合知识与技能第11章 中药调剂和贮藏养护的思维导图,涵盖中药处方,处方审核,处方调配,复核与发药。中药煎药,中药的质量变异。,药的贮藏与养护。
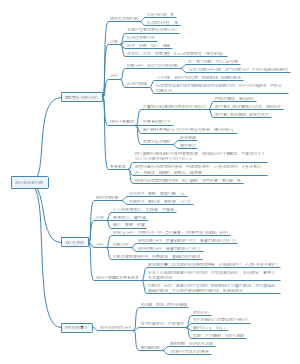
中药学综合知识与技能第9章 中医儿科五官科常见病的辨证论治,包括积滞、厌食、鼻渊、口疮、咽喉肿痛等。
社区模板帮助中心,点此进入>>
小儿常见病的辩证与护理
蛋白质
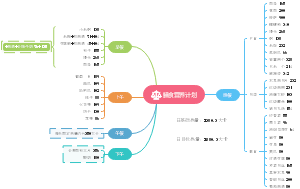
均衡饮食一周计划
消化系统常见病
耳鼻喉解剖与生理
糖尿病知识总结
细胞的基本功能
体格检查:一般检查
心裕济川传承谱
解热镇痛抗炎药
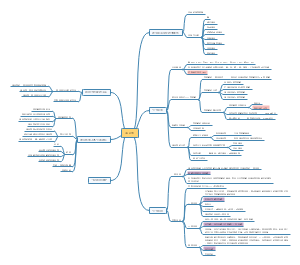
第13章 化痰止咳平喘药
第一节化痰药
半夏
【功效】
燥湿化痰,降逆止呕,消痞散结
【主治病证】
①痰多咳喘,痰饮眩悸,风痰眩晕,痰厥头痛
②胃气上逆,恶心呕吐
③胸脘痞闷,梅核气,瘿瘤痰核,痈疽肿毒
【使用注意】
反乌头,不宜与附子、川乌、制川乌、草乌、制草乌同用
天南星
燥湿化痰,祛风止痉,散结消肿
①顽痰咳嗽
②风痰眩晕,中风口眼斜,癫痫,破伤风
③痈疽肿痛,瘰疬痰核
芥子
温肺祛痰,利气散结,通络止痛
①寒痰咳喘,悬饮胁痛
②痰阻经络之肢体关节疼痛,阴疽流注
桔梗
宣肺,利咽,祛痰,排脓
①咳嗽痰多、咯痰不爽,咽痛音哑
②肺痈胸痛、咳吐脓血、痰黄腥臭
【配伍】
桔梗配甘草
既祛痰止咳,又利咽解毒,治咳嗽有痰,咽喉肿痛
旋覆花
消痰行水,降气止呕
①痰涎壅肺之喘咳痰多,痰饮蓄结之胸膈痞闷
②噫气,呕吐
旋覆花配赭石
寒温并用,降肺胃之逆气力强,治气逆呕恶、喘息效佳
瓜蒌
清肺润燥化痰,利气宽胸,消肿散结,润肠通便
①肺热咳嗽、痰稠不易咳出
②胸痹,结胸
③乳痈肿痛,肺痈,肠痈
④肠燥便秘
川贝母
清热化痰,润肺止咳,散结消痈
①肺热咳喘,外感咳嗽
②肺燥咳嗽,肺虚久咳,阴虚劳嗽
③痰热或火郁胸闷,瘰疬,疮肿,乳痈,肺痈
浙贝母
清热化痰,散结消肿
①肺热咳喘,风热咳嗽
②瘰疬,疮肿,乳痈,肺痈
竹茹
清热化痰,除烦止呕,安胎
①肺热咳嗽、咳痰黄稠
②痰火内扰之心烦失眠
③胃热呕吐,妊娠恶阻
④胎热胎动
竹沥
清热滑痰
①肺热之痰壅咳喘
②中风痰迷,惊痫癫狂
前胡
降气祛痰,宣散风热
①肺气不降之喘咳痰稠
②风热之咳嗽痰多
白附子
燥湿化痰,祛风止痉,解毒散结
①中风痰壅,口眼斜,破伤风,惊风癫痫,偏正头痛
②毒蛇咬伤,瘰疬痰核
白前
降气祛痰止咳
肺气壅实之咳喘气逆、痰多
昆布
消痰软坚,利水消肿
①瘰疬,瘿瘤
②脚气浮肿,水肿,小便不利
海藻
②脚气肿痛,水肿,小便不利
反甘草
天竺黄
清热化痰,清心定惊
痰热惊痫,中风痰壅
黄药子
化痰软坚散结,清热解毒,凉血止血
①瘿瘤
②疮痈肿毒,咽喉肿痛,毒蛇咬伤
③血热之吐衄、咯血
瓦楞子
消痰化瘀,软坚散结,制酸止痛
①顽痰久咳,瘰疬,瘿瘤
②癥瘕痞块
③胃痛泛酸
海蛤壳
清热化痰,软坚散结,利尿消肿,制酸止痛
①肺热、痰火咳喘
②瘿瘤,瘰疬,痰核
③水肿、小便不利
④胃痛泛酸
海浮石
清热化痰,软坚散结,通淋
①肺热咳喘
②瘰疬结核
③淋证
礞石
消痰下气,平肝镇惊
①顽痰、老痰胶结之气逆咳喘
②惊风抽搐,癫痫发狂
第二节止咳平喘药
苦杏仁
降气止咳平喘,润肠通便
①咳嗽气喘
②肠燥便秘
苦杏仁配紫苏
具有发散表邪,宣肺止咳之功,治凉燥袭肺,肺失宣降之恶寒头痛、咳嗽痰稀
百部
润肺止咳,杀虫灭虱
①新久咳嗽,百日咳,肺痨咳嗽
②蛲虫病,头虱,体虱
紫苏子
降气化痰,止咳平喘,润肠通便
①痰壅咳喘气逆
桑白皮
泻肺平喘,利水消肿
①肺热之咳喘痰多
②浮肿尿少,小便不利
葶苈子
①痰壅肺实之咳喘
紫菀
润肺下气,化痰止咳
①外感咳嗽、咳痰不爽
②肺虚久咳、痰中带血
款冬花
润肺下气,止咳化痰
多种咳嗽
枇杷叶
清肺止咳,降逆止呕
①肺热之咳喘痰稠
②胃热之烦渴、呕哕
马兜铃
清肺化痰,止咳平喘,清肠疗痔
①肺热咳嗽
②肺虚有热之咳喘或痰中带血
③痔疮肿痛、出血
白果
敛肺平喘,止带缩尿
①咳喘气逆痰多
②白浊,带下,尿频遗尿
白果配麻黄
收散并用,既可防麻黄辛散耗气,又可增降气平喘之力,可治咳喘之证
胖大海
清宣肺气,清肠通便
①肺热声哑,痰热咳嗽
②燥热便秘,肠热便血
洋金花
平喘止咳,解痉,定痛
①咳嗽哮喘
②小儿慢惊
③脘腹冷痛,风湿痹痛,外科麻醉