导图社区 基于自适应步态规划的下肢康复外骨骼研究设计
全面、系统、准确的把握下肢待康复者的行为特征,构建完善的自适应步态规划下肢复外骨骼的研究体系,为下肢受创采用康复训练的患者建立坚实理论基础,提高拥有多自由度步态规划的外骨骼患者下肢创伤恢复效率。
社区模板帮助中心,点此进入>>
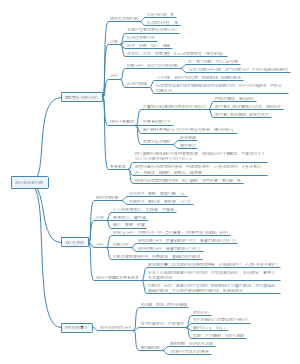
小儿常见病的辩证与护理
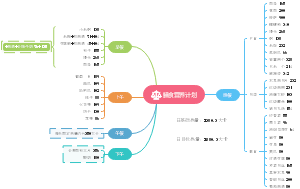
蛋白质
均衡饮食一周计划
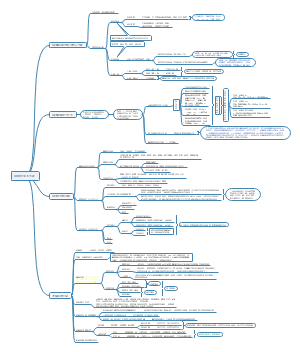
消化系统常见病
耳鼻喉解剖与生理
糖尿病知识总结
细胞的基本功能
体格检查:一般检查
心裕济川传承谱
解热镇痛抗炎药
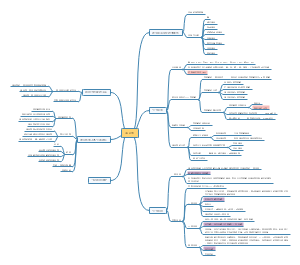
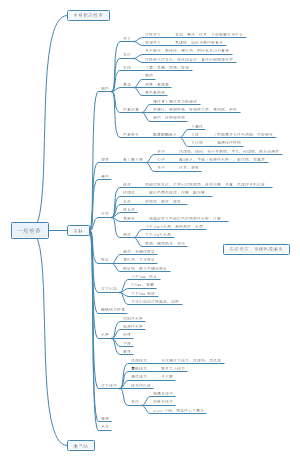
基于自适应步态规划表面肌电信号动作识别的下肢康复外骨骼研究设计
摘要
目的
全面、系统、准确的把握下肢待康复者的行为特征,构建完善的自适应步态规划下肢康复外骨骼的研究体系,为下肢受创采用康复训练的患者建立坚实理论基础,提高拥有多自由度步态规划的外骨骼患者下肢创伤恢复效率
方法
针对下肢受创进行康复训练患者,其中的地形自适应步态规划问题、患者个性化步态规划问题构建了线性倒立摆模型和动态运动基元的外骨骼机器人坡道自适应步态规划算法;
结论
上述研究在一定程度上解决了外骨骼机器人在地形自适应和患者自适应方面的步态建模与学习问题,可为外骨骼机器人在自适应步态规划方面的研宄提供参考。
一、绪论
1.1研究背景与意义
1.2下肢外骨骼机器人国内外的研究现状
1.3患者自适应步态规划的研究现状
1.4步态规划研究现状的总结及问题
二、下肢外骨骼康复机器人的结构设计
2.1研究人体下肢的各个参数与步态之间的相关性
不同人的体型有差异,其身体尺寸和重量等参数也各不相同,其中与步态相关的参数主要有性别、身高、体重、腿长等参数。
2.2步行功能障碍患者对自适应步态下肢康复助行器的功能结构需求
2.3人体下肢的运动机理与结构分析
2.4下肢康复机器人的康复结构设计
三、基于表面肌电信号的动作识别分类研究
3.1表面肌电信号的产生原理
3.2表面肌电信号的特点
3.3表面肌电信号特征的运动模式识别方法
3.4表面肌电采集反馈辅助行走外骨骼机器人的设计
结语
总结出目前国内外现有相关下肢康复设备的优缺点,针对中风偏瘫、意外伤害等造成的下肢运动功能障碍的患者,结合人因工程学提出一种多自由度下肢外骨骼康复机器人,帮助下肢运动功能障碍的病人实现多角度步态康复训练和助力行走