导图社区 三相交流电动机的电力拖动
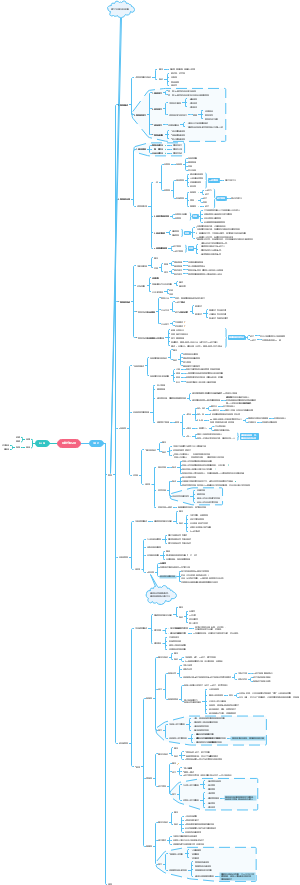
三相交流电动机的电力拖动思维导图
基于《电机与拖动基础及MATLAB仿真》整理的三相异步电动机的调速思维导图
社区模板帮助中心,点此进入>>
英语词性
法理
刑法总则
【华政插班生】文学常识-先秦
【华政插班生】文学常识-秦汉
文学常识:魏晋南北朝
【华政插班生】文学常识-隋唐五代
【华政插班生】文学常识-两宋
民法分论
日语高考動詞の活用
三相交流电动机 的电力拖动
三相异步电动机 的电力拖动
机械特性
实用表达式
人为机械特性
降低定子电压
拖动恒转矩负载调速效果不明显, 但拖动风机类负载,调速效果明显
定子回路串入对称电阻或电抗
笼型异步电动机的起动
转子回路串入对称三相电阻
绕线型式异步电 动机的起动和调速
三相异步 电动机的起动
普通笼型异步电动机的起动
起动条件:起动转矩Tst>1.1TL负载转矩
直接起动
条件
功率在7.5KW一下
k1=Ist/In<=0.75+Sn/4Pn
k1电流起动倍数,Ist启动电流、In额定电流、Sn变压器总容量kVA、Pn为额定功率KW
定子回路串电阻减压起动
小容量电动机
定子回路串电抗减压起动
较大容量的电动机
定子Y型连接,短路阻抗Zk=U1n/√3k1In
定子🔺连接,短路阻抗Zk=√3U1n/k1In
定子回路串自耦变压器减压起动
异步电动机的转矩与电压的二次方成正比
较大容量的笼型异步电动机,非技术因素导致不能重载起动
星-三角减压启动
定子为🔺连接的三相笼型异步电动机的减压起动
结论:减压起动的转矩是直接启动的1/3
绕线转子异步电机的起动
转子回路串入三相对称电阻起动
λm过载倍数=Tm/TN
最大转矩与额定转矩的比,反应其过载能力
起动转矩比λ=Tst1/Tst2
z2s=r2≈sN*E2N/√2I2n
Rn=λ^n *r2
Rst1=R1-r2
Rstn=Rn-R(n-1)
λ=m^√(Tn/sN*Tst1)
计算起动电阻
起动级数m未知
选Tst1≤0.85Tm=0.85λmTn,Tst2=(1.1-1.2)TL,起动转矩比λ=Tst1/Tst2
求m=lg(Tn/sN*Tst1)/lgλ,m取整后修正λ,检验Tst2≥1.1TL
计算r2, 联合λ求各级起动电阻和各段起动电阻的值
起动级数m已知
选Tst1≤0.85Tm=0.85λmTn,λ=m^√(Tn/sN*Tst1)
检验Tst2=Tst1/λ≥1.1TL,不满足则Tst1
z2s=r2≈sN*E2N/√2I2n ,计算r2, 联合λ求各级起动电阻和各段起动电阻的值
转子回路串入频敏变阻器起动
特殊型式笼型异步电动机的起动
深槽式异步电动机
双笼型异步电动机
高转差率异步电动机
异步电机的软启动
考虑因素
限制启动因素
启动转矩Tst>1.1TL
非技术因素
三相异步 电动机的制动
目的
①使系统迅速减速或停车; ②限制位能性负载的下放速度。
分类
机械制动
电气制动
反接制动
转速n与同步转速n1方向相反的运行
转子反转的反接制动(倒拉反接制动)
制动电阻Rad
适用范围
位能性负载下放重物,绕线型
能量关系:定子输入的电功率和由转子输入的机械功率这两部分能量全部消耗在转子电阻上
机械功率
Pm<0
电磁功率
Pem>0
转子铜耗
转子电阻的计算,额定转差率的计算
特点:能耗大
定子两相反接的反接制动
适用于:迅速正反转的轻载生产机械,笼型机不能反复使用
能量关系:
定子输入的电功率和由转子输入的机械功率这两部分能量全部消耗在转子电阻上
回馈制动
能量关系:(损耗与输送)扣除转子铜耗pCu2和机械损耗pm后转变成电磁功率向定子传送,回馈电网。
Pem<0
能量关系:(有功无功,电磁联系)电动机向电网输送有功功率的同时也从电网吸收滞后的无功功率,用以建立磁场
电动机输入的有功功率
电动机输入的无功功率
正向回馈
适用于
异步电动机变频调速或变极调速的降速
反向回馈
定子两相反接的反接制动 特性曲线的EF段
位能性负载
能耗制动
直流励磁电流计算公式
子主题
式中,I0为异步电动机空载电流,Io=(0.2~0.5)I1n
适用条件
位能性负载匀速下放
反抗性负载停车
制动转矩
与直流励磁电流大小有关
与转子回路中电阻的大小有关
三相异步 电动机的调速
变级调速
笼型异步电动机
适用原因
笼型转子的极对数能自动跟随定子极对数变化
原理
改变其中一个半相绕组的电流方向,电机产生的磁极对数即可改变。
方法
Y-YY变换
类型
恒转矩负载(功率因数和效率不变)
Pyy=2Py, Tyy=Ty
Δ-YY变换
恒功率负载*(功率因数和效率不变)
Pyy=2/√3Py, Tyy=1/√3T▲
优点
设备简单,有较硬的机械特性,运行可靠, 效率高,可适用于恒转矩调速, 也可适用于近似恒功率调速
缺点
只能有级调速
滑差电机调速
降低定子电压的调速
适用条件及原因
恒转矩负载
问题
调速范围很小
风机类负载
低速时功率因数低电流大
高转差率笼型电动机和绕线转子异步电动机
原因
降低定子电压,调速的范围较大
改变晶闸管触发延迟角α的大小,可改变电动机定子电压的大小,从而达到调速
应用
现代调压调速系统
转速反馈闭环控制
绕线转子 串电阻的调速
设备简单,初投资少,适用于对调速要求不高的生产机械
低速时转子铜损大,效率低,电动机发热严重,机械特性软,稳定性差
有极调速
绕线转子 异步电动机的 串级调速
E2为转子开路时的感应电动势,为常数, 当改变附加电动势Ead的大小时, 即可改变转差率s的大小,达调速目的
实现方法
转子电动势sE2整流成直流,经滤波电抗器后加到 晶闸管逆变器上,由逆变器将直流逆变成交流 ,通过变压器接至电网
特点
机械特性硬,调速平滑性好, 可实现无级调速,效率高, 但设备复杂,成本高
高电压、大容量如拖动风机类设备的场合
超同步串级调速
串入的附加电动势与转子电动势相位相同
次同步串级调速
串入的附加电动势与转子电动势相位相反
变频调速
基频以下的调速
U1≈E1=4.44f1N1kw1Fm
协调控制的方式
近似恒转矩调速方法
近似恒磁通控制方法,即保持U1/f1=常数
恒转矩调速方法
恒磁通控制方法保持E1/f1=常数
要求
定子电压必须与频率协调控制
基频以上的调速
近似恒功率调速
频率升高时,气隙磁通Fm随之减小,相当弱磁运行,电动机的电磁转矩T近似与频率f的变化成反比。
恒电流变频调速控制
变频调速过程中保持定子电流I1不变
保证变频器和调速系统的安全
特点:
频率连续可调,能实现无级调速,调速范围大, 机械特性硬,转速稳定性好,效率高等。
电力拖动基础
运动方程式
负载转矩特性
反抗性恒转矩负载特性
位能性恒转矩负载特性
风机、泵类负载
恒功率负载
电力系统稳定运行条件
1)电动机机械特性与负载特性必须相交,即交点处T=TL ; 2)在交点处有
三相同步电动机 的电力拖动
起动方法
辅助电动机起动法
变频起动法
异步起动法
交流调速系统分类