导图社区 《机械原理》知识总结
《机械原理》知识总结,包含周转福存在的充要条件、机构具有确定运动的条件、平面机构的自由度计算、速度、加速度多边形解题步骤等内容。
社区模板帮助中心,点此进入>>
英语词性
法理
刑法总则
【华政插班生】文学常识-先秦
【华政插班生】文学常识-秦汉
文学常识:魏晋南北朝
【华政插班生】文学常识-隋唐五代
民法分论
日语高考動詞の活用
第14章DNA的生物合成读书笔记
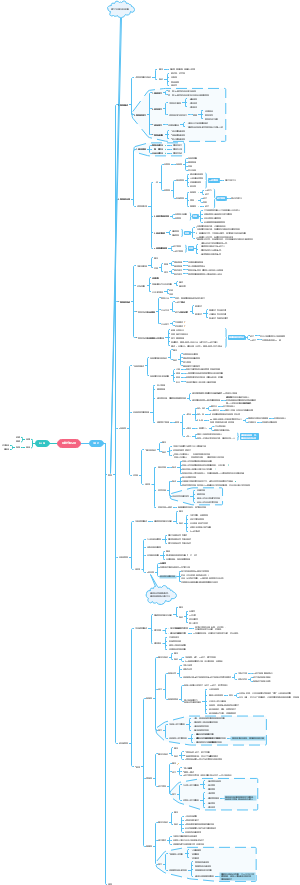
《机械原理》知识总结
第二章
周转福存在的充要条件
构成周转福的两构件中必有一个是最短杆
杆长条件:最短杆与最长杆之和小于或等于另两杆之和
铰链四杆机构,满足杆长条件,则:
连架杆或机架为最短杆
与最短杆相连的两个转动副皆为周转副
可判断
1.双曲柄机构--最短杆为机架
2.曲柄摇杆机构--最短杆为连架杆
3.双摇杆机构--以最短杆的对边为机架
铰链四杆机构,不满足杆长条件,则为双摇杆机构
第三章
机构具有确定运动的条件
主动件数等于自由度数(不为0)
平面机构的自由度计算
自记:使有确定运动需F个主动件,则有F个自由度
F=3n-(2Pl-Ph)
复合铰链:(m>2)个构件在同一出组成转动副, 有(m-1)个转动副
局部约束:(推杆装滚子),除去
冗余约束:即虚约束,重复约束,除去
公共约束:公式中待定数皆减1
第四章
速度、加速度多边形解题步骤(例4-1、例4-4)
画出机构位置图
建立适合的(加)速度方程
选取极点(绝对速度加速度为零的点)
建立(加)速度多边形
瞬心(虚拟转动中心,两构件的重合点及共速点)
瞬心计算
N=n(n-1)/2,n为构件数
瞬心确定
表4-1
四图
三心定理
互做平面运动的三个构件有三个瞬心,在同一直线上
平面机构运动学性能指标
行程:两极限位置的夹角ψ或位移
极位夹角θ:曲柄在两极限位置是的夹角(<90°)
急回系数(行程速比系数):
压力角μ:连杆与从动件(对于移动从动件, 指其法线方向)间的夹角
传动角γ:γmin=min{μmin,180°-μmax}
死点:机构不能运动处,γ=0°
避免:利用惯性或避开死点位置
第五章
平面滑块的自锁条件
作用面与水平面夹角β<摩擦角ψ
机械效率η≤0
第六章
盈亏功△W(一个周期内△W=0)
速度波动系数δ:即不均匀系数
飞轮转动惯量的确定
,J0为等效转动惯量
第七章
静平衡
静不平衡
动平衡
动不平衡
第九章
图解法求机构
给定连杆机构输出构件的两个极限位置(图9-9)
给定从动件行程和急回系数K(图9-10)
机构倒置法求机构
待求活动铰链(图9-12、15、16)
第十章
题10-4、5、8
第十一章
齿廓啮合基本规律
无论两齿廓在何位置接触,过接触点的齿廓公法线均应与连心线交于定点
渐开线的形成及特征
等、切、率、形、同、等、无
渐开线齿轮的传动比
基本参数
P240
标准安装时
啮合角等于分度圆压力角--
两分度圆分别与两节圆重合--
标准中心距--
齿轮中心距与啮合角的关系
正确啮合的条件
模数相等
压力角相等
重合度
第十二章
平面(空间)定轴轮系传动比
啮合旋向
外反内同
周转轮系传动比
给整个系统绕O1轴加一个角速度(-ωH),使行星架固定
混合轮系传动比计算步骤
将总系统分成几个基本轮系
分别计算各个轮系的传动比
寻找各个轮系之间的关系
联立求解