导图社区 矩阵分析
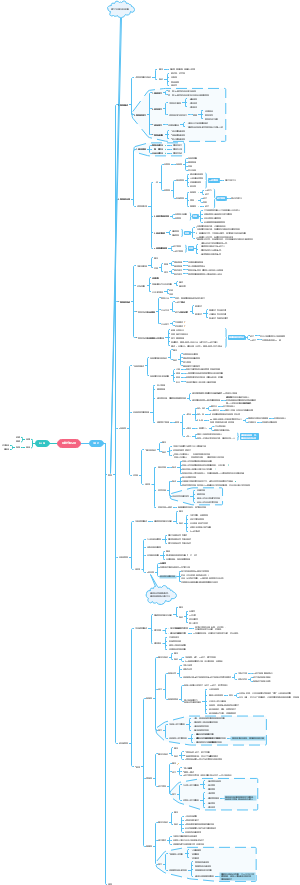
这是一篇关于矩阵分析的思维导图,主要内容包括:矩阵函数,矩阵合同,矩阵相似,矩阵分解,矩阵分析基础,线性代数基础。
社区模板帮助中心,点此进入>>
英语词性
法理
刑法总则
【华政插班生】文学常识-先秦
【华政插班生】文学常识-秦汉
文学常识:魏晋南北朝
【华政插班生】文学常识-隋唐五代
【华政插班生】文学常识-两宋
民法分论
日语高考動詞の活用
矩阵分析
线性代数基础
集合
两大关系
集合与元素之间
属于 不属于
集合与集合之间
包含 不包含 真包含
三大基本运算
交
并
补
混合运算
基本表示
列举法
描述法
特殊集合
幂集
子集为2^n个,2^A为所有子集的合集
映射
本质
集合与集合的关系
A-->B
A为原像集
B为像集
满射
B被全部映射
单射
B中元素被映射且被全部映射
双射
A与B一一映射
线性空间
线性
线性组合
数乘和加法
两个集合
对象集合
辅助集合
线性表出
运用上述两个集合进行线性组合表示对象集合的任意元素
线性相关
一组对象中存在一个对象可以由该组其他对象线性表出
线性无关
相反
数学表述
对象组的线性组合等于0时,其各项系数只能为0
极大无关组和对象组的秩
对象组线性无关
对象组中线性无关的元的个数
线性等价
两组对象可以互相线性表出
空间
集合性与封闭性
封闭性即是空间的线性组合仍在空间中
线性空间的二重性
线性特征
基底
维数
坐标
过渡矩阵A
从基底β到基底α
基底的转换
本义/从哪一个开始就右乘哪个基底矩阵
坐标的转换
到哪一个去就左乘哪一个的坐标
坐标变换公式
集合特征
空间的交是子空间
并不一定是子空间
如两条线的并
修正:张成的概念
补不是子空间,0空间被排除了
修正:直和
子集合
子空间
0空间对比空集
维数定理
子空间的维数不超过原空间的维数
A是空间K的子空间,dim(A)≤dim(K)
和空间的维数不超过原两个空间的维数的和
A,B是空间K的子空间,则dim(A+B)≤dim(A)+dim(B)
dim(A+B)=dim(A)+dim(B)-dim(A∩B)
与集合算法类似
直和空间的维数等于原两空间维数的和
A,B是空间K的子空间,则dim(A⨁B)=dim(A)+dim(B)
线性映射/线性变换
线性映射
空间变了,特征变了,从一个空间变成了另一个
非方阵
等价
原空间的基底经过一个过渡矩阵变换为另一个基底
线性变换
空间相同,自己与自己
特征不会变
方阵
相似
线性变换的不变子空间
定义
在一个大空间背景下,如果一个子空间的线性变换依然在这个子空间内,该空间被称为不变子空间
零子空间{0}和空间本身K在变换f下的不变子空间
线性含义
f管元不管数
线性特点
过渡矩阵是数,是坐标竖着写
可以直接写在f映射的后面
左边空间上的基经过f线性映射得到右边空间的基的线性组合
矩阵的核心就是一个线性映射
线性映射和线性变换都是在讨论两个空间的关系,区别在于是两个空间是否相同
核
方程Ax=0
A是映射矩阵,x是在这组基(来自于原空间)下的坐标
方程解空间的维数即为核子空间的维数
零度
值域
像空间的子集
因为可能是原空间的部分基做映射(变换)
欧式空间/酉空间
概念
辅助数集的差异,实数(欧式)到复数(酉)
度量:长度/角度 如何度量酉空间的长度/角度
长度
角度
度量矩阵
几个矩阵
酉矩阵
正交矩阵
正规矩阵
新概念
(反)对称矩阵
(反)H矩阵
均是正规矩阵
Hermite矩阵
复对称矩阵
内积
欧氏空间
对称性
齐次性
分配律(线性性)
非负性
酉空间
复对称性
复齐次性
分配律
线代矩阵基础
矩阵三大初等变换
包括行和列
左乘行变换
右乘列变换
初等矩阵
矩阵的四种写法
矩阵分析基础
范数
向量范数
直接照搬向量的模
性质
唯一性
三角不等式
形式
||α||≥0,称为元素α的范数,空间K也称为赋范线性空间
几个不等式
积的和不超过和的积
离散形式
积分形式
和的拆分不等式
p范数
p=1时,1-范数,即各分量模的总和
p=2时,2-范数,向量的模
p=∞时,∞-范数,向量分量的最大模
求法:提出最大模求极限
范数的等价性
证明收敛时可以使用任何一种范数
矩阵范数
矩阵范数满足五个条件
乘法相容性
∞-矩阵范数不满足相容性
由向量完全推广到矩阵失败
2-向量范数更名为F-矩阵范数
矩阵2-范数有了新的定义
矩阵诱导范数(算子范数)
为何叫诱导范数
由向量范数和向量范数计算出来的
定义过程
谱半径
矩阵分解
广义分解:相似,合同,等价均为分解
谱分解
特征向量相乘得到相应的矩阵(谱),系数为特征值
与正交相似(酉相似)做法一样
注意施密特正交化方法含义,帮助记忆
前提:正规矩阵
单纯矩阵(可对角化的矩阵),实数域的对角化方法
LU分解
L(low),U(up)/上三角,下三角
若中间出现对角阵,则存在LDU分解
行变换的乘法形式的再现
结果由行阶梯型/行标准型而不唯一/唯一
满秩分解
行满秩矩阵/列满秩矩阵与另一个矩阵相乘
正交三角分解
奇异值分解
V1是设出来的,然后依次验证①③两式
思路是双向推导然后汇总,左边是将矩阵分割自然得到,右边是设出V1得到
V2是补出来的,保证正交
矩阵相似
矩阵特征值和特征向量
特征向量
α
特征值
λ
特征值的几何重度
子空间维数
特征子空间
属于特征值λ的特征向量构成全体空间K的一个子空间,也称特征子空间
特征方程
根的代数重度
重根的重复次数
几个结论
矩阵A特征值的全体称为矩阵A的谱
λ(A)
矩阵A全体特征值的和等于矩阵A的迹
矩阵A全体特征值的积等于矩阵A的行列式
相似矩阵有相同的特征值
λ是变换f的特征值等价于λ是A的特征值
A是变换矩阵,对应f
α是变换f的属于λ的特征向量等价于α的坐标是A的属于λ的特征向量
特征值的几何重度不超过它的代数重度,当所有特征值的几何重度等于它的代数重度的时候,矩阵可以对角化
属于不同特征值的特征子空间的和一定是直和
交集为{0}
Schur引理
任何一个n阶复矩阵A酉相似一个上(下)三角矩阵
正规矩阵一定酉相似一个正规矩阵
正规矩阵若是三角阵,则一定是对角阵
正规矩阵一定酉相似一个对角阵
酉相似的操作跟正交相似一样
特殊情况
可对角化
充要条件
存在n个线性无关的特征向量
每个特征值的几何重度等于代数重度
正交相似
类比得到
酉相似
几个矩阵定义
实矩阵
元素都为实数
复矩阵
元素为复数的个数大于等于1
数字矩阵
以数字为元素
λ矩阵
元素是λ的多项式函数的个数大于等于1
矩阵合同
对称矩阵
实对称
复对称(hermite)
对称矩阵必然存在一个正交(酉)矩阵使其对角化
从实对称推广到复对称
合理性
验证矩阵二次型是一个实数/二次型的共轭(转置共轭)依然是该二次型,实数的性质
方法
Hermite矩阵的特征值时一个实数,故可以判断该矩阵定性的问题
矩阵函数
三种算法
多项式系统算法
最小多项式
对应Smith型的最后一个不变因子,称该多项式(最高次系数为1)
零化多项式
定理
矩阵的特征多项式是该矩阵的零化多项式
来源于:被除式=除式×商式+余式(由数到式)
约当矩阵算法
Jordan块
阶数
使用1连接对角线上相邻的元素
有n阶Jordan块
每一个Jordan块对应数字矩阵的一个特征值
每一个Jordan块的阶数对应于它的特征值的几何重度
如果每一个Jordan块都是一阶块,则说明矩阵可以对角化
每一个Jordan块的阶数与初等因子的次数相等
Jordan标准型
Jordan块按对角摆放
核心结论
任何一个数字矩阵将和一个Jordan矩阵相似,也就是对任意一个数字矩阵A,存在一个可逆变换矩阵P,使得
证明:分块矩阵乘法+数学归纳法
矩阵相似的充要条件
相同的初等因子
相同的不变因子
Smith型
通过三大变换(行列皆可)得到的对角矩阵
特征
对角阵
对角线从左上往右下依次整除
高次沉底
每个Jordan块对应的初等因子只能选择一次
Smith型与多项式系统的关系
大大简化了计算,对比由特征方程而来的零化多项式,Smith型提供了最小多项式使得矩阵多项式进一步降阶,从而简化计算
三大因子
初等因子
又名块因子
Jordan块对应
与特征值对应
不变因子
对角线上的所有元素
行列式因子
矩阵所有i阶子式的最大公因子
联系