导图社区 第九章 多元函数微分法及其应用
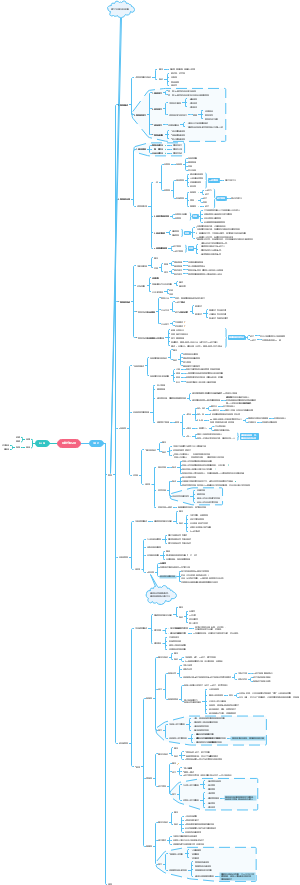
第九章 多元函数微分法及其应用
高数,内容包括多元函数定义、极限与连续性的描述,偏导数与高阶偏导数的定义及性质,全微分的定义及可微条件,链式法则的应用,隐函数求导公式,方向导数与梯度的定义,多元函数极值及拉格朗日乘数法等。
提示: 本内容由社区用户上传并分享。平台不对内容的真实性、合法性、知识产权归属及是否侵害第三方权利进行事前审核或保证。本内容可能包含受版权保护的图片、字体或其他第三方素材,使用前请自行确认授权范围。
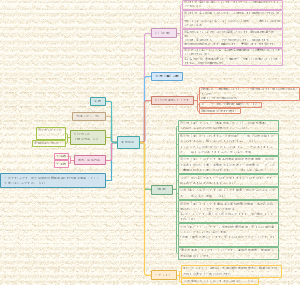
- 流体静力学
这是一篇关于流体静力学第二章思维导图,梳理了静止流体中应力的特性、流体平衡微分方程、重力场中压强分布规律、液体作用在平面上的总压力、液体作用在曲面上的总压力五大模块,完整覆盖静止流体应力特征、欧拉平衡方程、等压面性质、液体静力学基本方程、平面 / 曲面总压力计算方法(解析法 / 图解分析法 / 分解法)、惯性矩平行移轴定理、实战演练案例等高频考点,同时标注了关键公式、物理概念与解题思路,让抽象的流体力学理论与计算方法变得清晰直观。帮助使用者高效搭建流体力学知识框架,攻克流体静力学学习与备考难点。针对流体静力学学习与备考的核心痛点,导图清晰呈现了压强分布规律、总压力计算的核心公式与解题步骤,帮助使用者系统掌握流体静力学的核心理论与计算方法,构建完整的流体静力学知识体系。无论是在校学生期末复习、考研专业课备考,还是注册土木工程师考试复习,都能借助这份导图快速梳理考点,厘清公式应用逻辑,提升解题效率与准确率,也适合作为流体力学课程的教学辅助资料,帮助教师拆解复杂理论与计算难点。
- 正弦交流电路
该思维导图系统梳理了正弦交流电路的核心知识点,涵盖信号表示、元件特性、电路分析方法及实际应用优化,适合电工电子领域学习与复习。
- 电路的暂态分析
电路 电工学,涵盖了RC电路的响应、电阻元件、电感元件与电容元件、微分电路与积分电路、储能元件和换路定制等详细知识点。
第九章 多元函数微分法及其应用
社区模板帮助中心,点此进入>>
- 流体静力学
这是一篇关于流体静力学第二章思维导图,梳理了静止流体中应力的特性、流体平衡微分方程、重力场中压强分布规律、液体作用在平面上的总压力、液体作用在曲面上的总压力五大模块,完整覆盖静止流体应力特征、欧拉平衡方程、等压面性质、液体静力学基本方程、平面 / 曲面总压力计算方法(解析法 / 图解分析法 / 分解法)、惯性矩平行移轴定理、实战演练案例等高频考点,同时标注了关键公式、物理概念与解题思路,让抽象的流体力学理论与计算方法变得清晰直观。帮助使用者高效搭建流体力学知识框架,攻克流体静力学学习与备考难点。针对流体静力学学习与备考的核心痛点,导图清晰呈现了压强分布规律、总压力计算的核心公式与解题步骤,帮助使用者系统掌握流体静力学的核心理论与计算方法,构建完整的流体静力学知识体系。无论是在校学生期末复习、考研专业课备考,还是注册土木工程师考试复习,都能借助这份导图快速梳理考点,厘清公式应用逻辑,提升解题效率与准确率,也适合作为流体力学课程的教学辅助资料,帮助教师拆解复杂理论与计算难点。
- 正弦交流电路
该思维导图系统梳理了正弦交流电路的核心知识点,涵盖信号表示、元件特性、电路分析方法及实际应用优化,适合电工电子领域学习与复习。
- 电路的暂态分析
电路 电工学,涵盖了RC电路的响应、电阻元件、电感元件与电容元件、微分电路与积分电路、储能元件和换路定制等详细知识点。
- 相似推荐
- 大纲