导图社区 数控技术:数字控制实现工作过程的技术
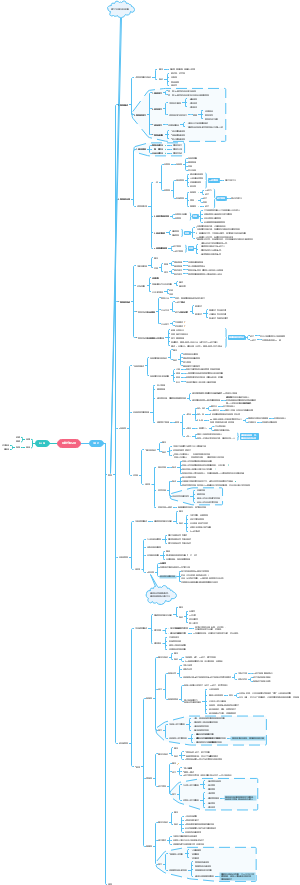
数控技术:数字控制实现工作过程的技术
这是一篇关于数控技术:数字控制实现工作过程的技术的思维导图,主要内容包括:数控加工特点,数控机床。总结全面细致,适合做为复习资料。
编辑于2025-07-09 15:48:18- 相似推荐
- 大纲
导图社区 数控技术:数字控制实现工作过程的技术
这是一篇关于数控技术:数字控制实现工作过程的技术的思维导图,主要内容包括:数控加工特点,数控机床。总结全面细致,适合做为复习资料。
编辑于2025-07-09 15:48:18