导图社区 飞行原理与性能(地面专业)
飞行原理与性能(地面专业)
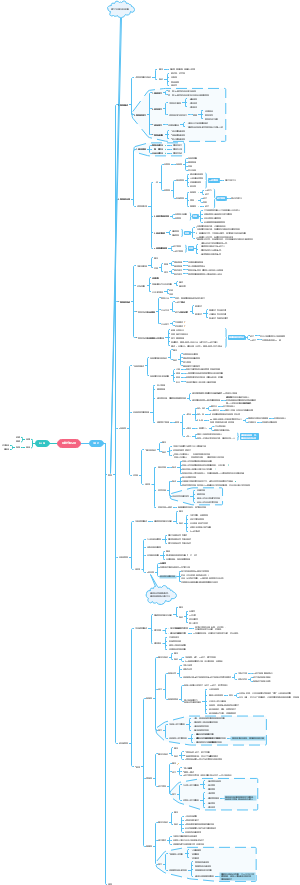
这是一篇关于飞行原理与性能(地面专业)思维导图,模板内容全面覆盖《飞行原理与性能》课程的核心要点,包括飞机的飞行环境、空气动力学基础、稳定性与操纵、起飞性能、上升下降性能、巡航性能、着陆与复飞等章节的关键概念、计算公式、操作流程与性能分析,支持编辑修改,可根据学习需求补充细节、调整结构,适配课程学习、备考复习、业务培训等多种场景,帮助用户高效梳理航空专业知识,提升学习与工作效率。完整覆盖课程的全部核心内容,每个章节下细分关键知识点、概念定义、计算公式与实操要点,既保留了航空专业知识的严谨性,又具备清晰的逻辑层级,帮助用户系统搭建飞行原理的知识框架。对于航空院校的学生而言,该模板可作为课程笔记、期末复习资料、飞行员执照考试备考工具,帮助快速梳理空气动力学、飞机稳定性与操纵、起飞着陆性能、巡航性能等核心知识点,理清不同飞行阶段的关键参数、操作流程与性能分析方法,解决课程知识点零散、概念抽象、公式繁多的痛点;对于民航飞行员、机务人员等从业者来说,模板是高效的知识复盘工具,可用于业务学习、技术培训、知识巩固,快速回顾飞行原理的核心理论,强化对飞行性能、操作规范的理解;对于航空爱好者而言,模板也可作为入门学习指南,帮助系统了解飞机飞行的基本原理与性能知识,建立清晰的知识体系。
编辑于2026-05-12 10:58:32- 飞行
- 民航
- 飞行原理与性能
- 航空专业课程笔记
- 飞行原理与性能(地面专业)
这是一篇关于飞行原理与性能(地面专业)思维导图,模板内容全面覆盖《飞行原理与性能》课程的核心要点,包括飞机的飞行环境、空气动力学基础、稳定性与操纵、起飞性能、上升下降性能、巡航性能、着陆与复飞等章节的关键概念、计算公式、操作流程与性能分析,支持编辑修改,可根据学习需求补充细节、调整结构,适配课程学习、备考复习、业务培训等多种场景,帮助用户高效梳理航空专业知识,提升学习与工作效率。完整覆盖课程的全部核心内容,每个章节下细分关键知识点、概念定义、计算公式与实操要点,既保留了航空专业知识的严谨性,又具备清晰的逻辑层级,帮助用户系统搭建飞行原理的知识框架。对于航空院校的学生而言,该模板可作为课程笔记、期末复习资料、飞行员执照考试备考工具,帮助快速梳理空气动力学、飞机稳定性与操纵、起飞着陆性能、巡航性能等核心知识点,理清不同飞行阶段的关键参数、操作流程与性能分析方法,解决课程知识点零散、概念抽象、公式繁多的痛点;对于民航飞行员、机务人员等从业者来说,模板是高效的知识复盘工具,可用于业务学习、技术培训、知识巩固,快速回顾飞行原理的核心理论,强化对飞行性能、操作规范的理解;对于航空爱好者而言,模板也可作为入门学习指南,帮助系统了解飞机飞行的基本原理与性能知识,建立清晰的知识体系。
- 高三一轮复习——第二章地球的运动
高三一轮复习 地理湘教版——第二章地球的运动,整理了宇宙中的地球、地球的历史和圈层的重点难点,大家可以用于备考复习。
- 第一章地球工具与地理实践
高三一轮复习 地理湘教版--第一章地球工具与地理实践,汇总了地球仪与地图和等高线的判读的重点难点,大家可以用于备考复习。可以作为学习笔记和复习资料,帮助大家系统地回顾和巩固所学知识,学生更好地理解和记忆知识。
飞行原理与性能(地面专业)
社区模板帮助中心,点此进入>>
- 飞行原理与性能(地面专业)
这是一篇关于飞行原理与性能(地面专业)思维导图,模板内容全面覆盖《飞行原理与性能》课程的核心要点,包括飞机的飞行环境、空气动力学基础、稳定性与操纵、起飞性能、上升下降性能、巡航性能、着陆与复飞等章节的关键概念、计算公式、操作流程与性能分析,支持编辑修改,可根据学习需求补充细节、调整结构,适配课程学习、备考复习、业务培训等多种场景,帮助用户高效梳理航空专业知识,提升学习与工作效率。完整覆盖课程的全部核心内容,每个章节下细分关键知识点、概念定义、计算公式与实操要点,既保留了航空专业知识的严谨性,又具备清晰的逻辑层级,帮助用户系统搭建飞行原理的知识框架。对于航空院校的学生而言,该模板可作为课程笔记、期末复习资料、飞行员执照考试备考工具,帮助快速梳理空气动力学、飞机稳定性与操纵、起飞着陆性能、巡航性能等核心知识点,理清不同飞行阶段的关键参数、操作流程与性能分析方法,解决课程知识点零散、概念抽象、公式繁多的痛点;对于民航飞行员、机务人员等从业者来说,模板是高效的知识复盘工具,可用于业务学习、技术培训、知识巩固,快速回顾飞行原理的核心理论,强化对飞行性能、操作规范的理解;对于航空爱好者而言,模板也可作为入门学习指南,帮助系统了解飞机飞行的基本原理与性能知识,建立清晰的知识体系。
- 高三一轮复习——第二章地球的运动
高三一轮复习 地理湘教版——第二章地球的运动,整理了宇宙中的地球、地球的历史和圈层的重点难点,大家可以用于备考复习。
- 第一章地球工具与地理实践
高三一轮复习 地理湘教版--第一章地球工具与地理实践,汇总了地球仪与地图和等高线的判读的重点难点,大家可以用于备考复习。可以作为学习笔记和复习资料,帮助大家系统地回顾和巩固所学知识,学生更好地理解和记忆知识。
- 相似推荐
- 大纲