导图社区 机械原理
机械原理知识大纲,包括机构的结构分析、平面机构的运动分析、平面机构的力分析、机械的效率和自锁、机械的平衡等。
社区模板帮助中心,点此进入>>
英语词性
法理
刑法总则
【华政插班生】文学常识-先秦
【华政插班生】文学常识-秦汉
文学常识:魏晋南北朝
【华政插班生】文学常识-隋唐五代
【华政插班生】文学常识-两宋
民法分论
日语高考動詞の活用
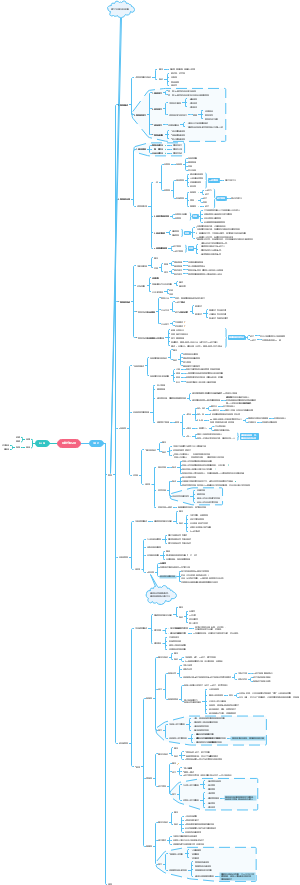
机械原理
第一章 绪论
机械是机器和机构的总称
机械>=1个机器>=1个机构>=2个构件>=1个零件
机械:盾构机,拖拉机
机器:柴油机,发动机
机构:点火装置,弹射装置
构件:基本运动
零件:基本加工制造
研究对象为机械,研究内容是有关机械的基本理论问题
第二章 机构的结构分析
机构结构分析的内容和目的
(1)研究机构的组成及机构运动简图的画法
(2)了解机构具有确定运动的条件
(3)研究机构的组成原理及结构的分类与设计
机构的组成及分类
机构的组成
机构:具有机架,可动的运动链
(1)构件
机器中每一个独立的运动单元体称为一个构件
零件
独立制造单元体
机器构造观点:任何机器都是由许多零件组成
构件
独立运动单元体
机器运动观点:任何机器都由若干个构件组合而成
(2)运动副
由两个构件直接接触的可动连接称为运动副
两构件上能够参加接触的表面称为运动副元素
运动副的分类
按引入的约束数目分类:
约束度为1的运动副为I级副,约束度为2的为II级副…最多为五级副
根据构成运动副的两构件的接触情况进行分类:
高副
两构件通过单一点或线接触而构成的运动副
低副
通过面接触而构成的运动副
按保持接触形式分
集合封闭或形封闭运动副
力封闭运动副(重力,弹簧力)
按两构件间的相对运动来分类:
平面运动副
转动副
两构件间的相对运动为转动的运动副称为转动副或回转副
移动副
相对运动为移动的运动副
空间运动副
由三个或三个以上的构件在同一处构成运动副:
复合运动副
复合铰链
胡克铰链
(3)运动链
构件通过运动副的连接而构成的可相对运动的系统称为运动链
如果组成运动链的各构件成了首末封闭的系统
称其为闭式运动链
简称闭链
自由度少,刚度大
反之称为开式运动链
简称开链
自由度多,工作空间大
根据各构件间的相对运动,可分为:
平面运动链
空间运动链
(4)机构
机构
具有固定构件的运动链
机架
相对固定的构件
原动件
机构中按给定的已知运动规律独立运动的构件
从动件
其余活动构件
机构的分类
1)根据运动副组成情况分为
低副机构
高副机构
2)根据机构的运动情况分
平面机构
空间机构
3)根据机构的构件情况和机构的工作原理
连杆机构
凸轮机构
齿轮机构
棘轮机构
槽轮机构
螺纹机构
摩擦传动机构
4)根据组成机构的构件性质
刚性机构
柔性机构
挠性传动机构
气动机构
液压机构,等
运动观点:机构是由机架,原动件和从动件组成;同一运动链当取不同构件为机架时,可以获得不同的机构类型
机构运动简图
简图:构件+运动副
根据机构的运动尺寸,按比例尺绘出的,用以表示机构运动传递情况的简化图形称为机构运动简图
原则:
能简单清楚地把机构的结构及运动传递情况正确地表示出来
绘制步骤
1)分析机构组成
搞清机械的构造及运动情况
查明各机构和运动副的类别及位置
2)选定视图平面
3)取比例尺作图
先根据机械机构的运动尺寸,确定出各运动副的位置
然后再画出各运动副符号及常用机构运动简图符号
最后用简单线条或几何图形连接即可
4)完成必要标注
机构具有确定运动的条件和最小阻力定律
最简单的机构:由两个构件组成
机构具有确定运动的条件
机构的原动件数应等于其自由度数
机构的自由度(用F表示)
机构具有确定运动时所必须给定的独立运动参数的数目
最小阻力定律
即优先沿阻力最小的方向运动
原动件数小于机构自由度
欠驱机构
优点:驱动小;缺点:运动不确定
机构运动将不完全确定,此时遵循阻力最小定律
原动件数大于机构自由度
冗驱机构
优点:承载能力强,刚度大
将导致机构中最薄弱的环节损坏
机构自由度的计算
平面机构自由度的计算
各构件只作平面运动,所以每个自由构件具有三个自由度。每个平面低副(移动副和转动副)各提供两个约束,每个平面高副只提供一个约束。设活动构件为n
故机构的自由度计算公式为:F=3n-(2pl+ph)
正确计算运动副的数目
1)复合铰链
铰链数目m-1
2)同一运动副,只计算一个副
各移动方向彼此平行
各转动轴线重合
各接触点公法线彼此重合
要除去局部自由度 F'
某些构件所产生的局部运动并不影响其他构件的运动,则称这种局部运动的自由度为局部自由度
要除去虚约束 P'
在机构中,有些运动副带入的约束对机构的运动只起重复约束作用,特把这类约束称为虚约束
产生虚约束的情况:
1)机构中,如果用转动副连接的是两构件上运动轨迹相重合的点,则该连接将带入1个虚约束
轨迹重合
2)机构中,如果用双转动副杆连接的是两运动构件上某两点之间的距离始终保持不变的两点,也将带入1个虚约束
距离恒定
3)在机构中,不影响机构运动传递的重复部分所带入的约束为虚约束
结构重复
平面机构的组成原理、结构分类及结构分析
基本杆组
最后不能再拆的最简单的自由度为零的机构组(阿苏尔杆组或杆组)
1•平面机构的组成原理
任何机构都可以看作是由若干个基本杆组依次连接于原动件和机架上而构成的。
2•平面机构的分类
由2个构件和3个低副构成的
二级组
2杆3副
由4个构件和6个低副所组成的
三级组
4杆6副
机构按含最高级别杆组分类
二级机构
三级机构
一级机构
只由机架和原动件构成
同一机构可包含不同级别的杆组
3•平面机构的结构分析
分析目的
分析机构组成,确定机构级别
1)先计算机构的自由度(除去机构中的局部自由度和虚约束),并确定原动件
2)从远离原动件的构件开始拆杆组。先拆二级组,若不成。再拆三级组——直至拆出只剩原动件和机架为止
3)确定机构的级别
同一机构因取原动件不同,可能为不同级别机构;高副机构需高副低代后再进行结构分析与分类。
4•平面机构的高副低代
高副低代是一种瞬时替代
为了便于对含有高副的平面机构进行分析研究,将机构中的高副根据一定的条件虚拟地以低副来代替。这种将高副以低副来代替的方法称为高副低代
高副低代必须满足的条件
1)代替前后机构的自由度完全相同
2)代替前后机构的瞬时速度和瞬时加速度完全相同
高副低代的方法
用一个虚拟两副构件分别联接两构件高副接触点处的曲率中心。
若高副两元素之一为直线
则低代时变为移动副
若高副两元素之一为一点
则低代时就变为此点
第三章 平面机构的运动分析
机构运动分析的任务
已知
机构尺寸及原动件运动规律
确定
从动件上某些点的轨迹、位移、速度及加速度 从动件的角位移、角速度及角加速度
机构运动分析的目的
分析现有机械的运动性能
设计新的机械
研究机械动力性能
机构运动分析的方法
1)图解法
简捷、直观、方便;
精度能满足一般要求;
适用机构个别位置运动分析
一般图解法和便捷图解法
一般图解法
矢量方程图解法—相对运动图解法
基本原理
理论力学中的运动合成原理
分析步骤
先列出运动矢量方程,然后再按方程作图求解
同一构件上两点间的速度及加速度图解
运动矢量方程
两个重要特性
速度多边形、加速度多边形
速度影像、加速度影像
便捷图解法
速度瞬心法
速度瞬心及其位置确定
速度瞬心
两构件上的瞬时速度等速重合点即同速点
绝对瞬心:Vp =0
相对瞬心:Vp不等于0
机构瞬心的数目
K=N(N-1)/2
N—机构构件总数(含机架)
瞬心位置的确定
1)由瞬心定义确定
在其中心处
在其导路的无穷远处
纯滚动副
在其接触点处
滚动高副
在过其接触点两高副元素的公法线上
2)三心定理
互作平面运动三构件的三个瞬心必位于同一直线上
机构的传动比
原动件与从动件的瞬时角速度之比
等于两构件绝对瞬心至相对瞬心距离的反比
瞬心法的特点
图解简单机构的传动比、构件的角速度和构件上点的速度显得十分简便; 但当瞬心落在纸面外时图解困难,且不能用于求解加速度
瞬心线
瞬心的位置随两构件运动而在各自构件上形成的一条轨迹曲线
机构运动时,动瞬心线将沿着定瞬心线作无滑动的纯滚动
利用瞬心线可进行高、低副机构之间的运动等效变换
综合法
综合运用瞬心法和矢量方程图解法作机构速度分析的方法
2)解析法
特点
可借助计算机获得系列结果和运动线图,并进行机构优化和综合
精度很高
适用机构整个运动循环的运动分析
基本思想
机构运动分析的关键
建立机构包含机构尺寸与运动参数的位置、速度及加速度方程
首先,建立机构的封闭矢量运动方程
然后,再对时间求导数,求得机构的速度及加速度方程,进而完成机构的运动分析
基本方法
建立机构的封闭矢量方程
杆矢量
按采用数学工具不同可分为
复数矢量法
矩阵法
第六章 机械的平衡
第五章 机械的效率和自锁
第四章 平面机构的力分析