导图社区 第十三章温度控制系统与构建
第十三章温度控制系统与构建
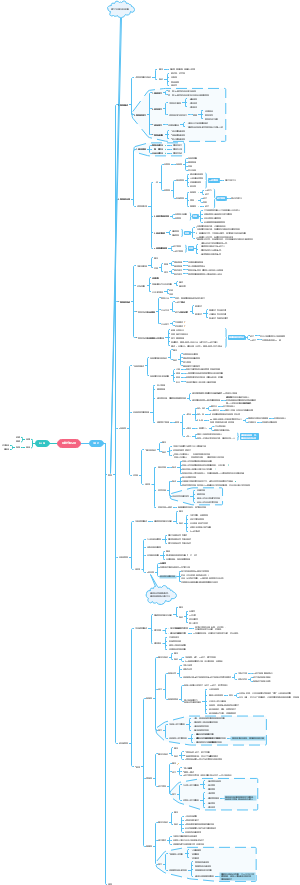
这是一篇关于第十三章温度控制系统与构建的思维导图,主要内容包括:通用测量控制系统的品质指标,温控器调节原理,通过用控制系统的分类,构成。PID控制器是一种广泛应用于自动控制系统中的调节器,它由比例(P)、积分(I)和微分(D)三个部分组成。每个部分在控制过程中都扮演着特定的角色,以调整被控变量(如液位、温度等)至设定值。
编辑于2024-06-12 15:28:22- 自动化
- 基导
- 广西大学
- 基础导学与初步实践
- 第十三章温度控制系统与构建
这是一篇关于第十三章温度控制系统与构建的思维导图,主要内容包括:通用测量控制系统的品质指标,温控器调节原理,通过用控制系统的分类,构成。PID控制器是一种广泛应用于自动控制系统中的调节器,它由比例(P)、积分(I)和微分(D)三个部分组成。每个部分在控制过程中都扮演着特定的角色,以调整被控变量(如液位、温度等)至设定值。
- 检测的基本概念
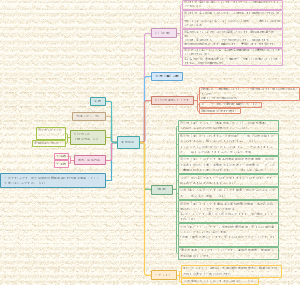
这是一篇关于检测的基本概念的思维导图,主要内容包括:传感器,电工电子测量仪表与性能,测量数据的读取,数据处理,测量误差,测量方法与分类,测量与检测。
- 第十章 电气、液压、气动基本控制系统
这是一篇关于第十章 电气、液压、气动基本控制系统的思维导图,主要内容包括:降压启动,制动:为满足生产机械的工艺要求或提高生产质量和效率,要求生产机械迅速停止和准确定位,三相异步电动机的直接启停控制。
第十三章温度控制系统与构建
社区模板帮助中心,点此进入>>
- 第十三章温度控制系统与构建
这是一篇关于第十三章温度控制系统与构建的思维导图,主要内容包括:通用测量控制系统的品质指标,温控器调节原理,通过用控制系统的分类,构成。PID控制器是一种广泛应用于自动控制系统中的调节器,它由比例(P)、积分(I)和微分(D)三个部分组成。每个部分在控制过程中都扮演着特定的角色,以调整被控变量(如液位、温度等)至设定值。
- 检测的基本概念
这是一篇关于检测的基本概念的思维导图,主要内容包括:传感器,电工电子测量仪表与性能,测量数据的读取,数据处理,测量误差,测量方法与分类,测量与检测。
- 第十章 电气、液压、气动基本控制系统
这是一篇关于第十章 电气、液压、气动基本控制系统的思维导图,主要内容包括:降压启动,制动:为满足生产机械的工艺要求或提高生产质量和效率,要求生产机械迅速停止和准确定位,三相异步电动机的直接启停控制。
- 相似推荐
- 大纲