导图社区 自动控制原理
自动控制原理
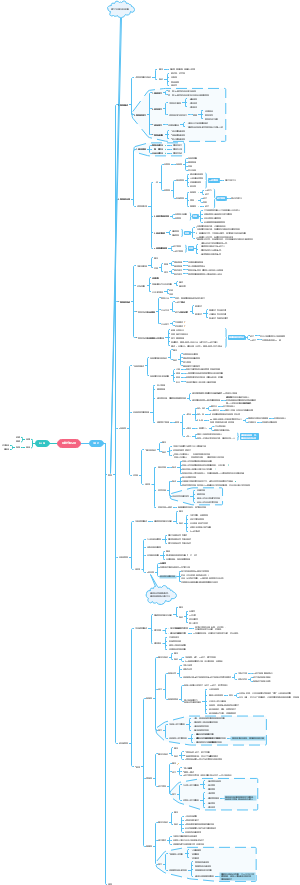
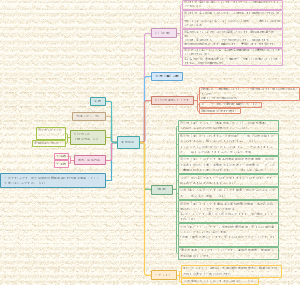
想知道如何控制巡航导弹精确命中千里之外的目标、无人化智能工厂如何控制机床实现精密加工吗?“自动控制原理”将告诉你系统是如何实现自动控制,达到预定目标的。本思维导图是大连理工大学自动控制原理第4章知识点整理,喜欢的小伙伴可以点个赞哦!
编辑于2019-10-18 06:11:46- 相似推荐
- 大纲
导图社区 自动控制原理
想知道如何控制巡航导弹精确命中千里之外的目标、无人化智能工厂如何控制机床实现精密加工吗?“自动控制原理”将告诉你系统是如何实现自动控制,达到预定目标的。本思维导图是大连理工大学自动控制原理第4章知识点整理,喜欢的小伙伴可以点个赞哦!
编辑于2019-10-18 06:11:46