导图社区 理论力学-静力学
理论力学-静力学
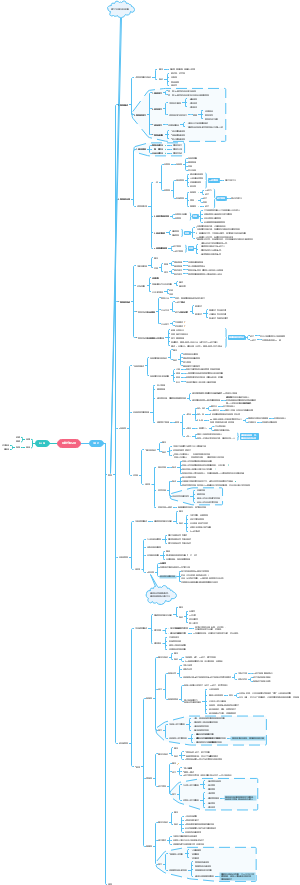
静力学(statics)是理论力学的一个分支,研究质点系受力作用时的平衡规律。伐里农1725年引入的。静力学也可应用于动力学。借助于达朗伯原理,可将动力学问题化为静力学问题的形式。静力学在工程技术中有广泛的应用。例如设计房梁的截面,一般须先根据平衡条件由粱所受的规定载荷求出未知的约束力,然后再进行梁的强度和刚度分析。
编辑于2021-05-12 21:19:38- 静力学
- 力学竞赛
- 理论力学-运动学
运动力学在传统物理学中是一个空白。运动是宇宙最基本的现象,天体的运动突出表现为公转和自转,在简易论中,运动还包括天体轨道的移动。运动力学通常指物体的运动,物质的运动属量子力学。目前天体物理学运用量子力学解释宇宙天体的运动,把物质的运动和物体的运动混淆到一起,给人类留下了越来越多的未解谜团,解开这些未解谜团必需有一个完善的运动力学。传统运动力学,以牛顿运动引力定律为代表。引力和离心力是运动力学的两种基本力,引力表现为物质的凝聚,离心力表现为物质的扩散。
- 理论力学-动力学
动力学是理论力学的一个分支学科,它主要研究作用于物体的力与物体运动的关系。动力学的研究对象是运动速度远小于光速的宏观物体。动力学是物理学和天文学的基础,也是许多工程学科的基础。许多数学上的进展也常与解决动力学问题有关,所以数学家对动力学有着浓厚的兴趣。
- 理论力学-静力学
静力学(statics)是理论力学的一个分支,研究质点系受力作用时的平衡规律。伐里农1725年引入的。静力学也可应用于动力学。借助于达朗伯原理,可将动力学问题化为静力学问题的形式。静力学在工程技术中有广泛的应用。例如设计房梁的截面,一般须先根据平衡条件由粱所受的规定载荷求出未知的约束力,然后再进行梁的强度和刚度分析。
理论力学-静力学
社区模板帮助中心,点此进入>>
- 理论力学-运动学
运动力学在传统物理学中是一个空白。运动是宇宙最基本的现象,天体的运动突出表现为公转和自转,在简易论中,运动还包括天体轨道的移动。运动力学通常指物体的运动,物质的运动属量子力学。目前天体物理学运用量子力学解释宇宙天体的运动,把物质的运动和物体的运动混淆到一起,给人类留下了越来越多的未解谜团,解开这些未解谜团必需有一个完善的运动力学。传统运动力学,以牛顿运动引力定律为代表。引力和离心力是运动力学的两种基本力,引力表现为物质的凝聚,离心力表现为物质的扩散。
- 理论力学-动力学
动力学是理论力学的一个分支学科,它主要研究作用于物体的力与物体运动的关系。动力学的研究对象是运动速度远小于光速的宏观物体。动力学是物理学和天文学的基础,也是许多工程学科的基础。许多数学上的进展也常与解决动力学问题有关,所以数学家对动力学有着浓厚的兴趣。
- 理论力学-静力学
静力学(statics)是理论力学的一个分支,研究质点系受力作用时的平衡规律。伐里农1725年引入的。静力学也可应用于动力学。借助于达朗伯原理,可将动力学问题化为静力学问题的形式。静力学在工程技术中有广泛的应用。例如设计房梁的截面,一般须先根据平衡条件由粱所受的规定载荷求出未知的约束力,然后再进行梁的强度和刚度分析。
- 相似推荐
- 大纲